カスケード制御とは何ですか?
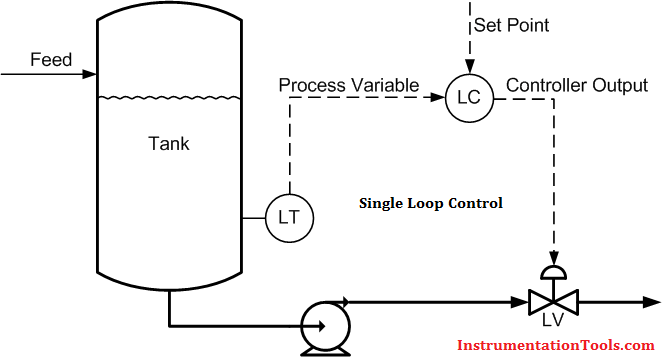
シングルループ制御では、コントローラのセットポイントはオペレータによって設定され、その出力は最終的な制御要素を駆動します。 例えば:セット-ポイントでレベルを保つために制御弁を運転する水平なコントローラー。
カスケード制御配置では、一つのコントローラの出力が別のコントローラのセットポイントを駆動する二つ(またはそれ以上)のコントロー 例えば: そのセットポイントでレベルを維持するために、フローコントローラのセットポイントを駆動するレベルコントローラ。 流れのコントローラーは、それから、レベルコントローラーが要求しているセット-ポイントと流れに一致させるために制御弁を運転する。
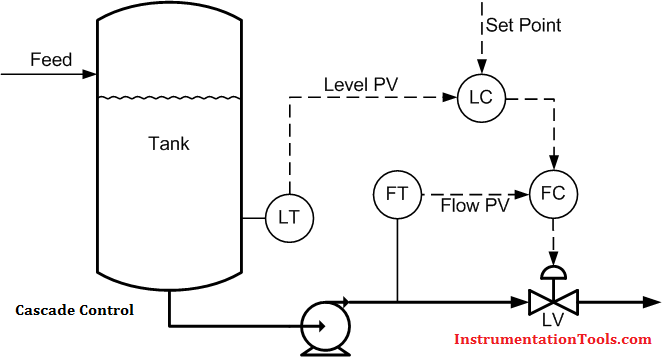
セットポイントを駆動するコントローラ(上記の例ではレベルコントローラ)は、プライマリコントローラ、アウターコントローラ、マスターコントローラと呼ばれます。 セットポイントを受信するコントローラ(この例ではフローコントローラ)は、セカンダリコントローラ、インナコントローラ、またはスレーブコントローラと呼ばれます。
カスケード制御は、(1)外乱が測定可能な中間または二次プロセス出力に影響を与え、制御したい一次プロセス出力に直接影響を与えるか、(2)アクチュエータを含む二次プロセスのゲインが非線形である場合に、シングルループ制御よりも制御システムの性能を向上させることができます。 最初のケースでは、カスケード制御システムは、一次出力に二次変数に入る外乱の影響を制限することができます。 後者の場合、カスケード制御システムは、制御システム性能に対するアクチュエータまたは二次プロセス利得変動の影響を制限することができる。 このような利得変動は、通常、設定点の変化または持続的な外乱による動作点の変化から生じる。
カスケード制御はいつ使用する必要がありますか?
カスケード制御は、比較的遅いダイナミクス(レベル、温度、組成、湿度など)を持つプロセスがあり、液体や気体の流れ、または他の比較的速いプロセスを操作して、遅いプロセスを制御する必要がある場合は、常に使用する必要があります。 例えば: 凝縮器の圧力(真空)を制御するために冷却水の流量を変更するか、熱交換器の出口の温度を制御するために蒸気の流量を変更します。 どちらの場合も、フロー制御ループはカスケード配置の内部ループとして使用する必要があります。
カスケード制御には何か欠点がありますか?
カスケード制御には三つの欠点があります。 一つは、それが動作するように追加の測定(通常は流量)を必要とします。 二つは、調整する必要があり、追加のコントローラがあります。 そして、3つは、制御戦略がより複雑である–同様にエンジニアやオペレータのために。 これらの欠点は、カスケード制御を実装する必要があるかどうかを決定するために、制御の期待される改善の利点と比較して検討する必要があります。
カスケード制御はいつ使用すべきではありませんか?
カスケード制御は、内側のループのダイナミクスが外側のループのダイナミクスと比較して速い場合にのみ有益です。 カスケード制御は、通常、内側のループが外側のループよりも少なくとも三倍高速でない場合、パフォーマンスの向上は複雑さの増加を正当化しない可能性が
内部ループが外部ループよりも大幅に高速でない場合、カスケード制御の利点が減少することに加えて、特に内部ループが非常に積極的に調整されている場
カスケードコントロールはどのように調整する必要がありますか?
カスケード配置は、最も内側のループから開始して調整する必要があります。 その1つが調整されると、カスケード制御、または外部セットポイントモードに配置され、そのセットポイントを駆動するループが調整されます。 内部ループと外部ループのプロセスダイナミクスが似ていると不安定になる可能性があるため、カスケード構造内の制御ループを調整するには、四分の一振幅減衰調整ルール(変更されていないZiegler-NicholsルールやCohen-Coonルールなど)を使用しないでください。