Qu’est-ce que le Contrôle en cascade?
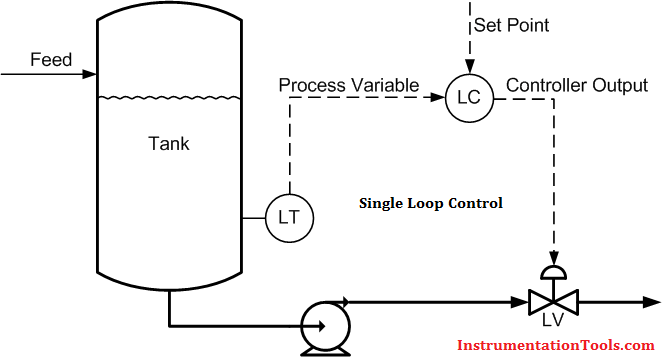
Dans le contrôle à boucle unique, le point de consigne du contrôleur est défini par un opérateur et sa sortie entraîne un élément de commande final. Par exemple : un régulateur de niveau entraînant une vanne de régulation pour maintenir le niveau à son point de consigne.
Dans un agencement de commande en cascade, il existe deux contrôleurs (ou plus) dont la sortie d’un contrôleur pilote le point de consigne d’un autre contrôleur. Exemple: un contrôleur de niveau entraînant le point de consigne d’un contrôleur de débit pour maintenir le niveau à son point de consigne. Le régulateur de débit, à son tour, entraîne une vanne de régulation pour faire correspondre le débit avec le point de consigne demandé par le régulateur de niveau.
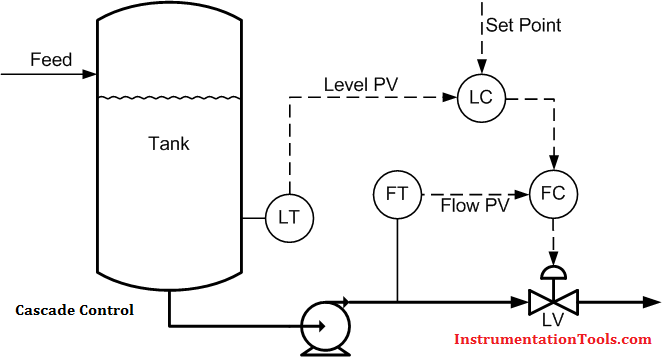
Le contrôleur qui pilote la consigne (le contrôleur de niveau dans l’exemple ci-dessus) est appelé contrôleur principal, externe ou maître. Le contrôleur recevant la consigne (contrôleur de débit dans l’exemple) est appelé contrôleur secondaire, interne ou esclave.
Le contrôle en cascade peut améliorer les performances du système de contrôle par rapport au contrôle à boucle unique chaque fois que: (1) Des perturbations affectent une sortie de processus intermédiaire ou secondaire mesurable qui affecte directement la sortie de processus primaire que nous souhaitons contrôler; ou (2) le gain du processus secondaire, y compris l’actionneur, est non linéaire. Dans le premier cas, un système de commande en cascade peut limiter l’effet des perturbations entrant dans la variable secondaire sur la sortie primaire. Dans le second cas, un système de commande en cascade peut limiter l’effet des variations de gain de l’actionneur ou du processus secondaire sur les performances du système de commande. Ces variations de gain résultent généralement de changements de point de fonctionnement dus à des changements de consigne ou à des perturbations soutenues.
Quand le contrôle en cascade doit-il être utilisé?
Le contrôle en cascade doit toujours être utilisé si vous avez un processus avec une dynamique relativement lente (comme le niveau, la température, la composition, l’humidité) et qu’un flux de liquide ou de gaz, ou un autre processus relativement rapide, doit être manipulé pour contrôler le processus lent. Exemple: modification du débit d’eau de refroidissement pour contrôler la pression du condenseur (vide) ou modification du débit de vapeur pour contrôler la température de sortie de l’échangeur de chaleur. Dans les deux cas, les boucles de contrôle de flux doivent être utilisées comme boucles internes dans les arrangements en cascade.
Le Contrôle En Cascade Présente-t-Il des Inconvénients?
Le contrôle en cascade présente trois inconvénients. Premièrement, cela nécessite une mesure supplémentaire (généralement le débit) pour fonctionner. Deuxièmement, il y a un contrôleur supplémentaire qui doit être réglé. Troisièmement, la stratégie de contrôle est plus complexe, tant pour les ingénieurs que pour les opérateurs. Ces inconvénients doivent être mis en balance avec les avantages de l’amélioration attendue du contrôle pour décider si un contrôle en cascade doit être mis en œuvre.
Quand Le contrôle en cascade ne doit-il pas être utilisé?
Le contrôle en cascade n’est bénéfique que si la dynamique de la boucle interne est rapide par rapport à celle de la boucle externe. Le contrôle en cascade ne doit généralement pas être utilisé si la boucle interne n’est pas au moins trois fois plus rapide que la boucle externe, car les performances améliorées peuvent ne pas justifier la complexité supplémentaire.
En plus des avantages diminués du contrôle en cascade lorsque la boucle interne n’est pas significativement plus rapide que la boucle externe, il existe également un risque d’interaction entre les deux boucles qui pourrait entraîner une instabilité – en particulier si la boucle interne est accordée de manière très agressive.
Comment les commandes en cascade doivent-elles être Réglées ?
Un arrangement en cascade doit être réglé en commençant par la boucle la plus interne. Une fois que celui-ci est réglé, il est placé en contrôle en cascade, ou en mode de consigne externe, puis la boucle entraînant sa consigne est réglée. N’utilisez pas de règles de réglage d’amortissement du quart d’amplitude (telles que les règles de Ziegler-Nichols et Cohen-Coon non modifiées) pour régler les boucles de contrôle dans une structure en cascade, car cela peut provoquer une instabilité si la dynamique de processus des boucles internes et externes est similaire.